Planungsalgorithmus – Technische Dokumentation
Diese Seite beschreibt den Planungsalgorithmus von Goaldone, der dynamische Aufgaben automatisch auf die verfügbaren Arbeitszeiten der Nutzer verteilt. Der Algorithmus arbeitet pro Arbeitgeber-Account isoliert; Arbeitszeiten zwischen Accounts werden bereits beim Anlegen validiert, um Überschneidungen zu vermeiden.
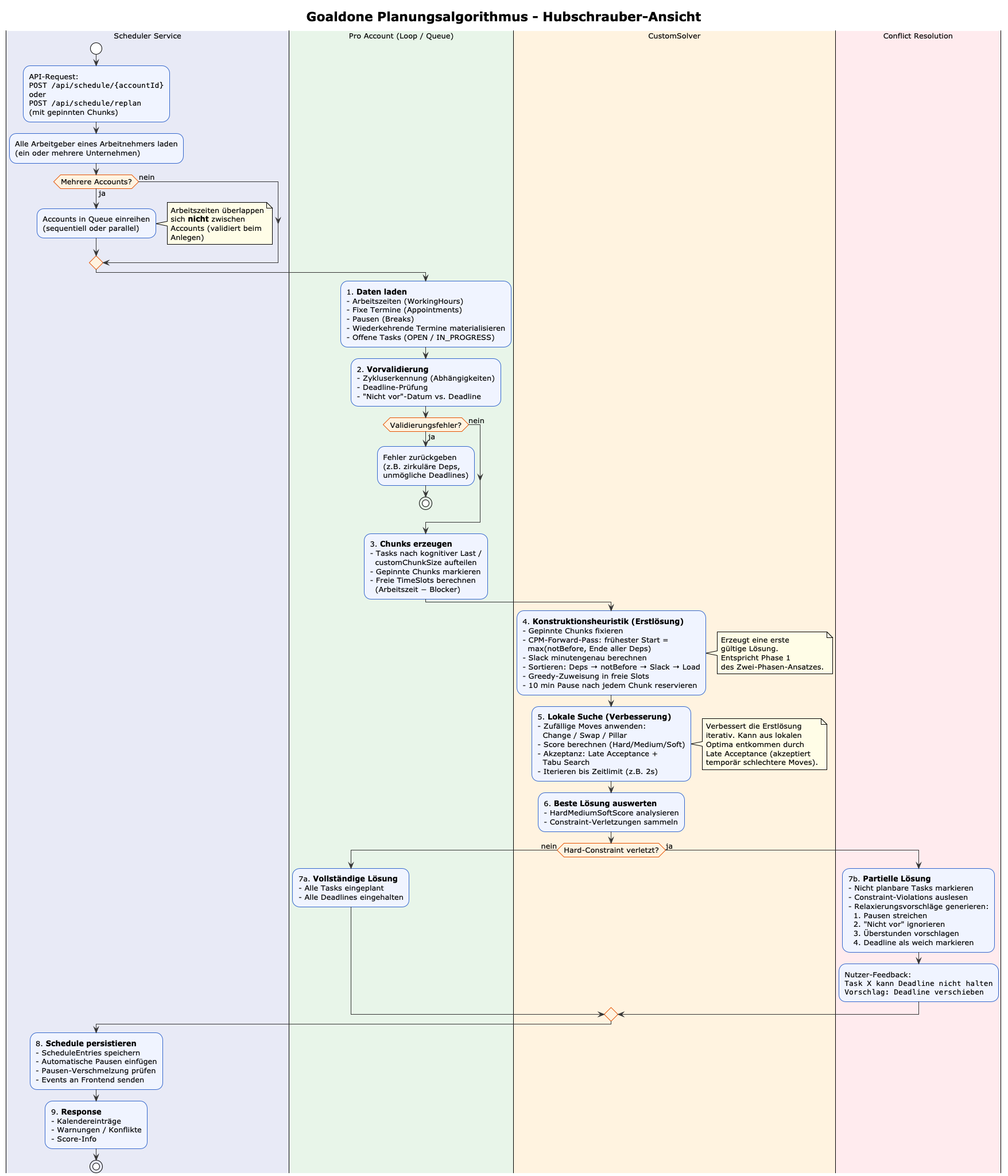
Goaldone Planungsalgorithmus: Gesamtüberblick
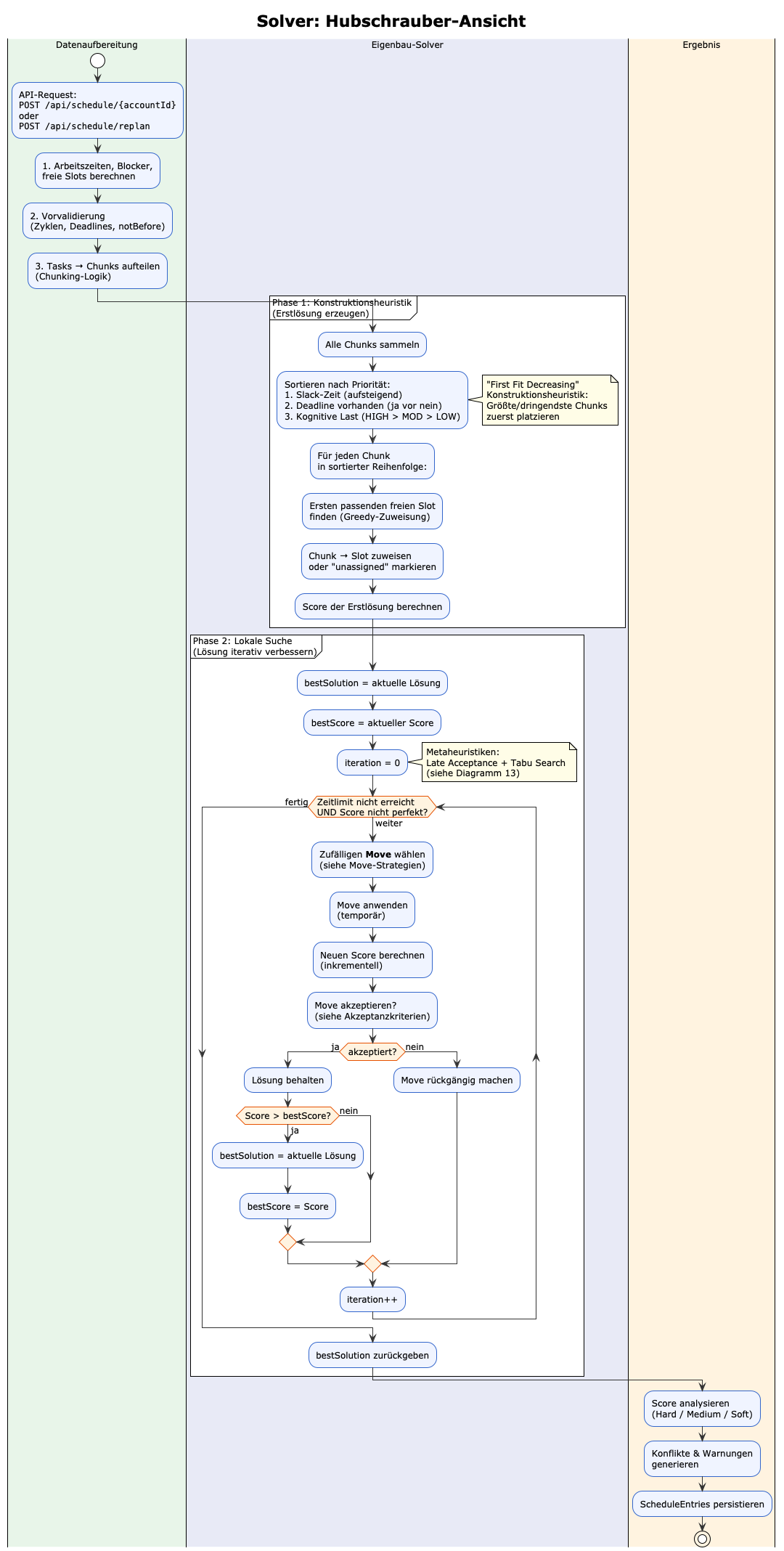
Das Diagramm zeigt den vollständigen Ablauf des Planungsalgorithmus von der API-Anfrage bis zur gespeicherten Lösung. Der Algorithmus folgt einem dreistufigen Ansatz:
- Phase 1 (Datenaufbereitung): Laden und Validieren von Arbeitszeiten, Blockern und Tasks.
- Phase 2 (Konstruktionsheuristik): Erzeugung einer ersten Lösung mittels einer CPM-basierten (Critical Path Method) Heuristik.
- Phase 3 (Lokale Suche): Iterative Verbesserung der Erstlösung durch eine Metaheuristik (Late Acceptance Hill Climbing + Tabu Search).
Diagramm anzeigen
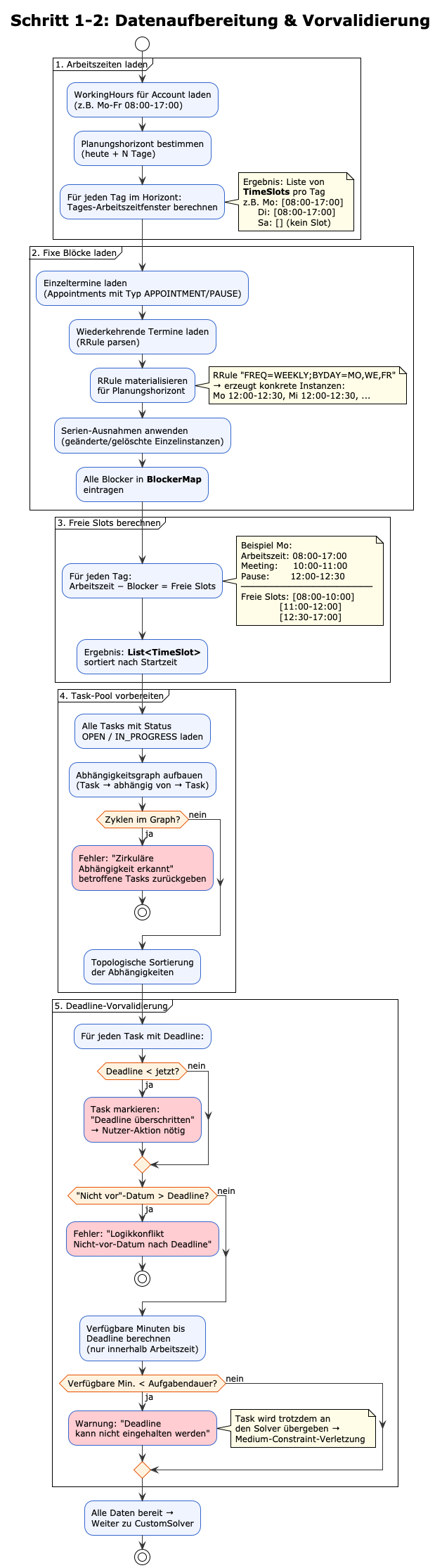
Phase 1: Datenaufbereitung & Vorvalidierung
In dieser Phase werden die Eingabedaten für den Solver materialisiert und validiert:
- Arbeitszeiten & Blocker: Reguläre Arbeitszeiten werden für den Planungshorizont (heute + N Tage) in konkrete Tages-Zeitfenster umgerechnet. Fixe Blocker (Termine, Pausen) und wiederkehrende Termine (RRule-Format inkl. Ausnahmen) werden materialisiert. Die Differenz ergibt die freien TimeSlots.
- Task-Pool: Alle offenen Aufgaben (OPEN, IN_PROGRESS) werden geladen. Der Abhängigkeitsgraph wird mittels topologischer Sortierung auf Zyklen geprüft.
- Logische Prüfung: Aufgaben mit Deadlines in der Vergangenheit oder logischen Konflikten (z. B. "Nicht planen vor"-Datum liegt nach der Deadline) werden abgefangen und führen zu Fehlermeldungen.
Diagramm anzeigen
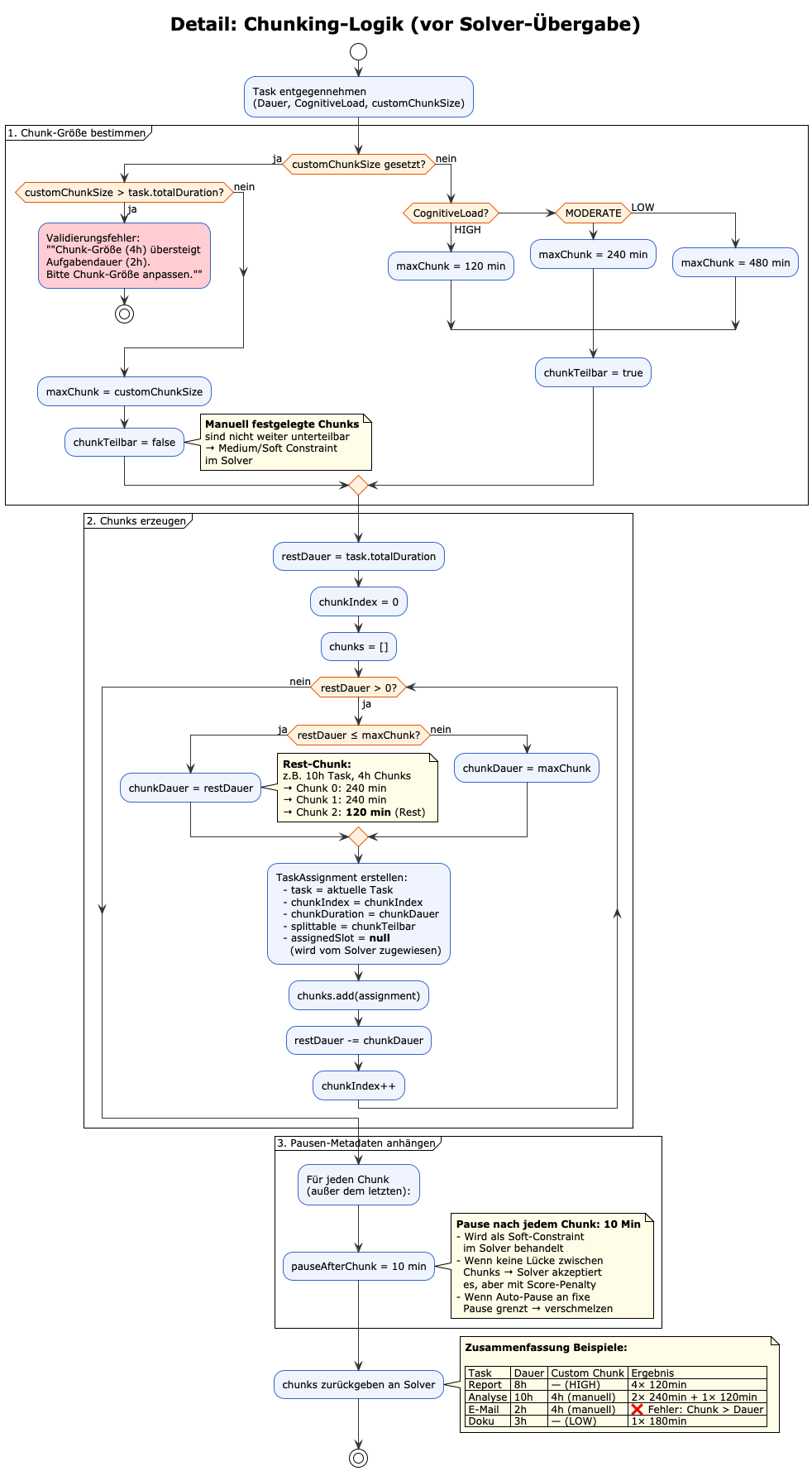
Chunking-Logik (Aufgabenzerlegung)
Um eine flexible Planung zu ermöglichen, werden Aufgaben in Arbeitsblöcke (Chunks) unterteilt. Die maximale Chunk-Dauer richtet sich nach der kognitiven Last:
- HIGH: max. 2 Stunden
- MODERATE: max. 4 Stunden
- LOW: max. 8 Stunden
Nutzer können diese Werte pro Aufgabe durch eine manuell festgelegte Chunk-Größe überschreiben; diese Chunks werden dann als nicht weiter unterteilbar behandelt. Der letzte Chunk einer Aufgabe erhält die verbleibende Restdauer. Nach jedem Chunk wird eine 10-minütige Pause reserviert, sofern ein weiterer Chunk folgt.
Diagramm anzeigen
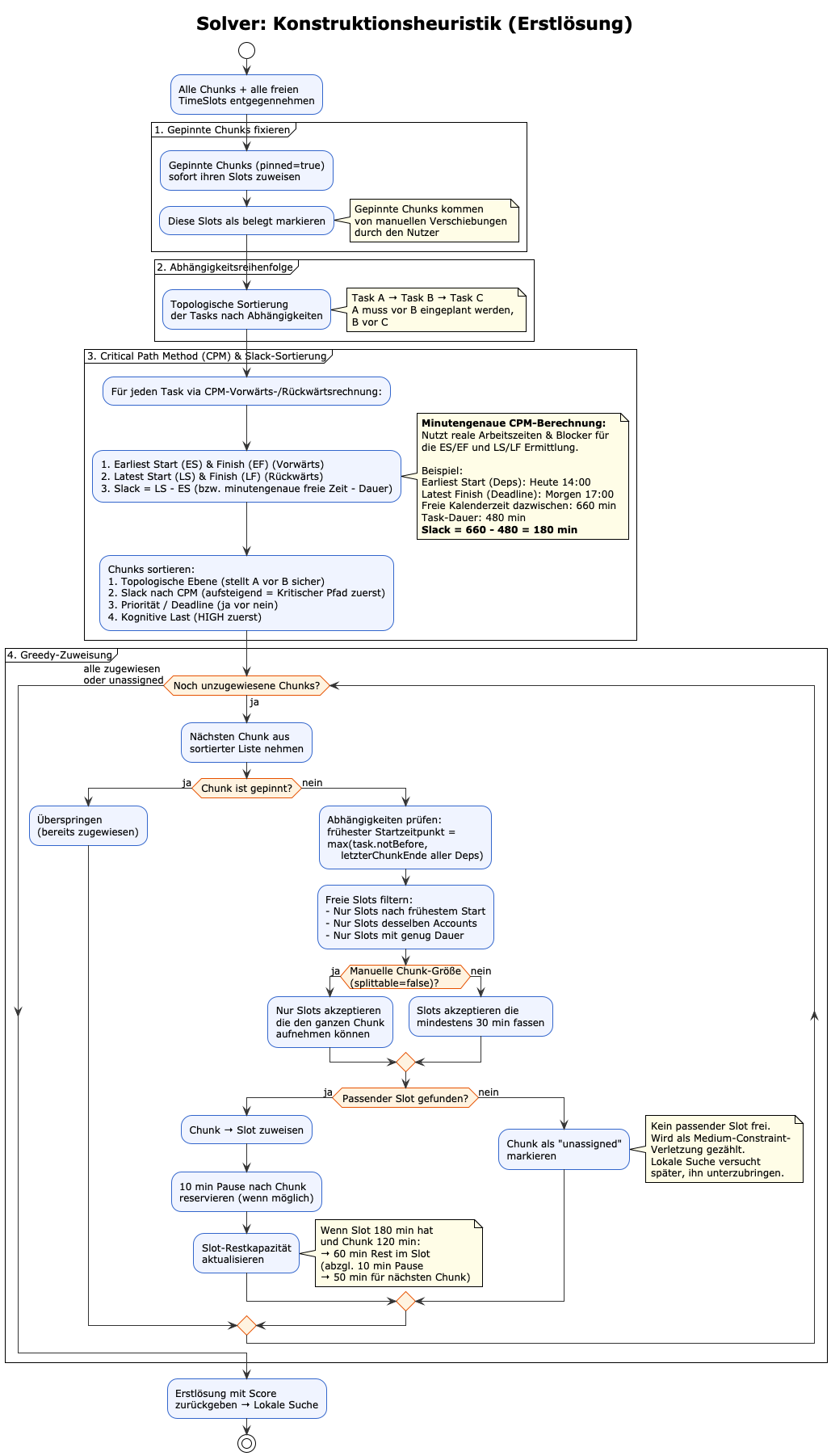
Phase 2: Konstruktionsheuristik (Erstlösung)
Die Erstlösung wird durch eine Greedy-Heuristik erzeugt, deren Priorisierung auf dem vollständigen Critical Path Method (CPM) Algorithmus mit minutengenauer Slack-Berechnung beruht.
CPM-Algorithmus (ES, EF, LS, LF): Der vollständige CPM-Algorithmus wird angewendet:
- Forward Pass: Berechnung der Early Start (ES) und Early Finish (EF) für jede Aufgabe basierend auf Abhängigkeiten
- Backward Pass: Berechnung der Late Start (LS) und Late Finish (LF) ausgehend von den Deadlines
- Slack-Berechnung: Der Slack für jede Aufgabe ergibt sich aus (LS - ES) bzw. (LF - EF) und wird zur Priorisierung genutzt
Chunks werden sortiert nach:
- Topologische Ebene der Abhängigkeiten
- "Nicht planen vor"-Datum
- Slack-Wert (aufsteigend)
- Kognitive Last (HIGH vor MODERATE vor LOW)
Anschließend wird jeder Chunk dem frühesten passenden freien Slot zugewiesen. Bereits gepinnte Chunks bleiben dabei fixiert.
Diagramm anzeigen
Phase 3: Lokale Suche (Iterative Verbesserung)
Die Erstlösung wird durch eine Metaheuristik iterativ verbessert, bis ein Zeitlimit (z. B. 2 Sekunden) erreicht ist. Dabei werden zufällige Änderungen (Moves) vorgenommen und deren Auswirkung auf einen lexikographisch geordneten HardSoftScore bewertet.
- Hard-Constraints: Dürfen nie verletzt werden (Zeitüberlappungen, Abhängigkeitsreihenfolge, "Nicht vor"-Datum, Account-Zuordnung).
- Soft-Constraints: Optimieren Slack-Priorisierung, Pausen-Verschmelzung und Chunk-Kompaktheit.
Diagramm anzeigen
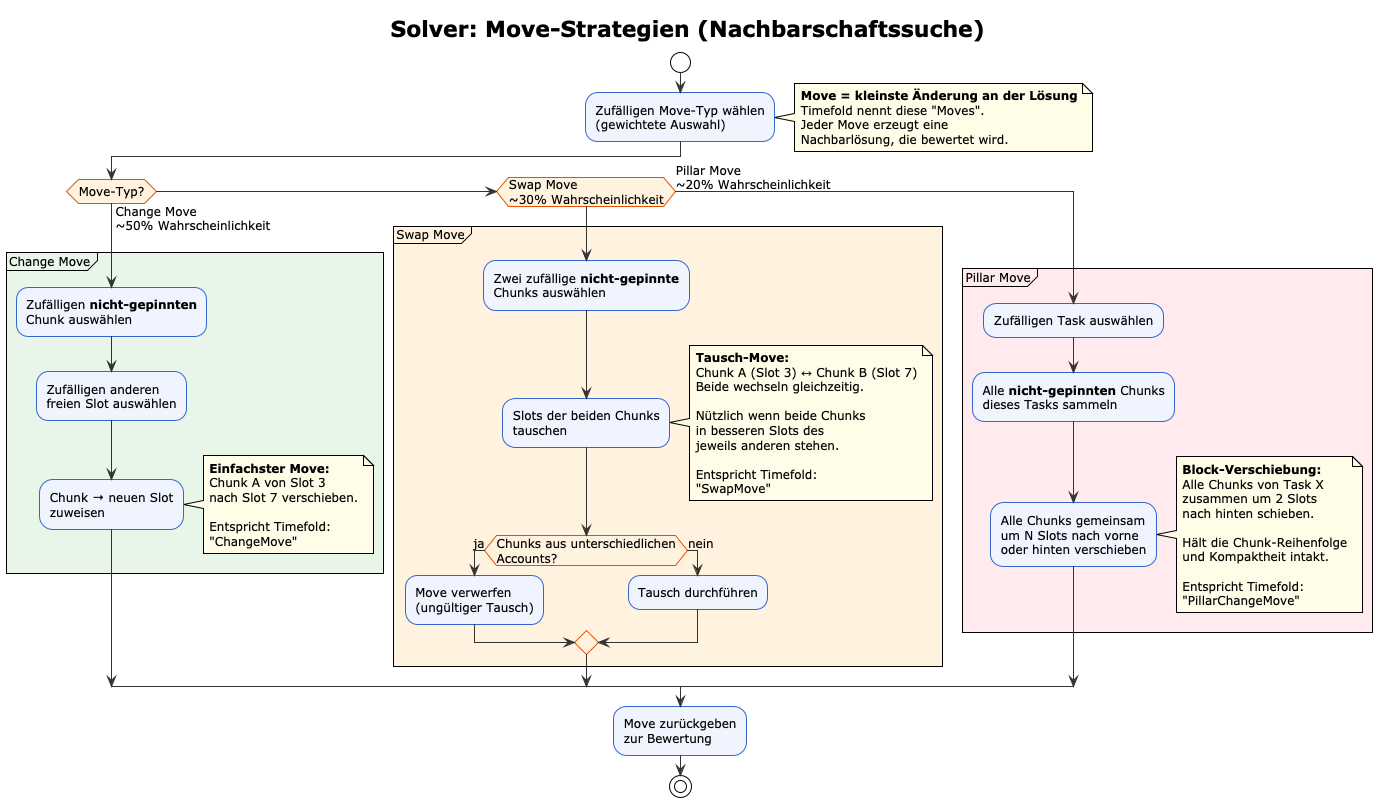
Move-Strategien
Drei Typen von Moves werden eingesetzt, um den Lösungsraum zu explorieren:
- ChangeMove (~50%): Ein Chunk wird in einen anderen freien Slot verschoben.
- SwapMove (~30%): Zwei Chunks tauschen ihre jeweiligen Slots.
- PillarMove (~20%): Alle Chunks einer Aufgabe werden gemeinsam verschoben, um die Kompaktheit zu wahren.
Gepinnte Chunks (manuelle Verschiebung) sind von allen Moves ausgeschlossen.
Diagramm anzeigen
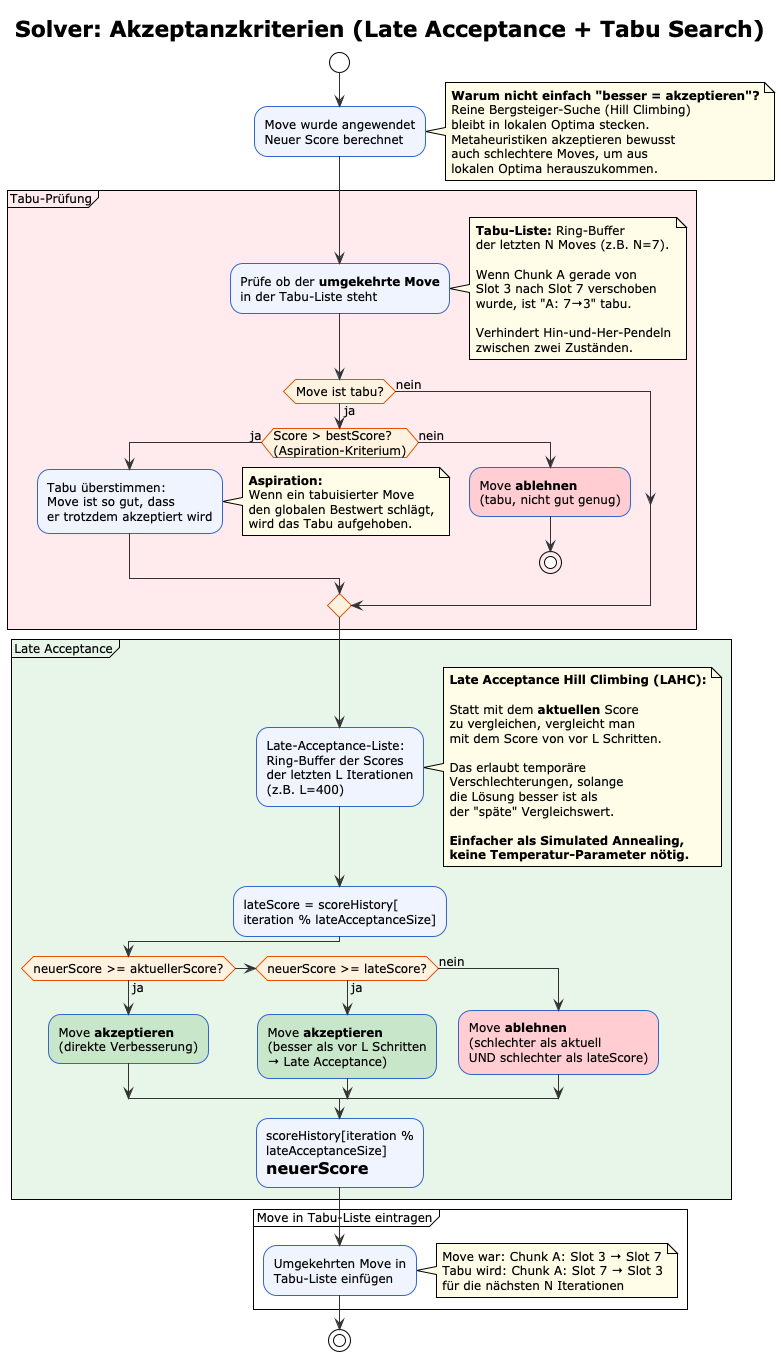
Akzeptanzkriterien (Late Acceptance + Tabu Search)
Um lokale Optima zu verlassen, nutzt der Solver zwei Mechanismen:
- Late Acceptance Hill Climbing (LAHC): Ein Move wird akzeptiert, wenn er die aktuelle Lösung verbessert oder besser ist als die Lösung von vor $L=400$ Iterationen.
- Tabu Search: Eine Tabu-Liste (Größe 7) verhindert das unmittelbare Zurückspringen in vorherige Zustände. Ein Aspiration-Kriterium erlaubt die Aufhebung eines Tabus, wenn der Move den globalen Bestwert übertrifft.
Diagramm anzeigen
Konflikterkennung und Nutzer-Feedback
Kann der Solver keine gültige Lösung finden (Hard-Score < 0) oder müssen Deadlines verletzt werden, erfolgt ein Feedback an den Nutzer.